
当店では ” 動作技術 ” を向上させることで、スローガンである
” 出来なかったことを出来るように ”
するためのアプローチをしています。
当店が考える ” 動作技術 ” を構成する3つの要素(動的可動性・神経伝達力・瞬発力)
の内一つが ” 動的可動性 ” です。
3つの要素は全て重要なのですが、最重要視していると言っても過言ではないです。
場合によっては、” 動作技術=動的可動性 ” とも考えています。
動的可動性とは
自力でコントロールして関節を動かせる範囲の広さなのですが、
その土台として、
動的可動域(自動可動域・機能的可動域など様々な呼び方があります)
が必要となります。
動的可動域とは何か?なぜ重要なのか?
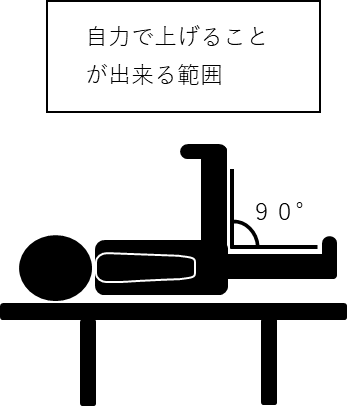
仰向けで片脚を上げる動作(SLR)を例にお話すると、
自力で脚上げ出来る範囲が ”動的可動域” です。※自動可動域や機能的可動域など様々な呼び方があります。
自力ではなく誰かに手を添えて押してもらうなど、他力ありきではじめて動かせる範囲が ”機能しない可動域” です。
※これも他動的可動域など色々呼び方があります。
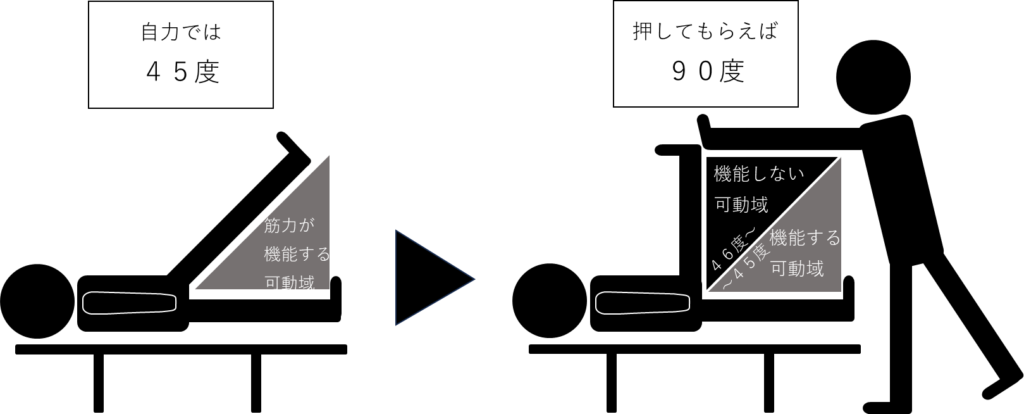
上図の場合、
【自力で動かせる範囲45度】-【押してもらえば動く90度】 = ▲45度
が機能しない可動域となります。
自力でコントロール出来ない ”機能しない可動域” が大きい程、
関節の不安定性が増加する可能性が高く、傷害発生リスクが高まります。
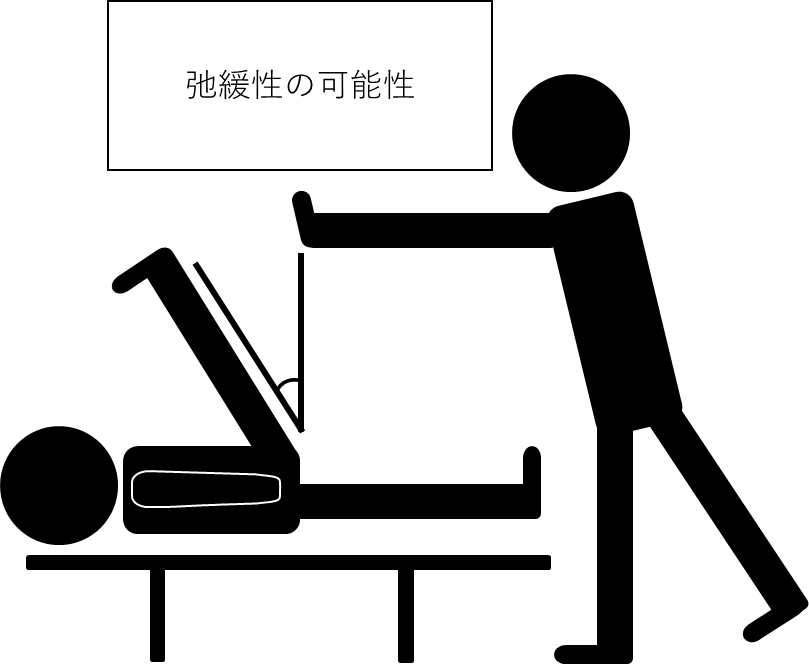
また、可動域も大きければ大きいほど良いというわけではなく、適正範囲の基準があります。
この基準を超えている状態を ”弛緩性” と言います。
実際にクライアントを観察していると、弛緩性のある関節の筋力は弱いことがほとんどです。
例に挙げているSLR動作において一つの要素として、主にモモ裏(ハムストリング)の柔軟性が要求されます。
基準値は一般的に概ね挙上角度70度~90度と考えられますが、90度を大幅に超えると弛緩性と判断されます。
股関節屈曲の動きに弛緩性のあるクライアントのスクワット系動作を観察すると、しゃがんだところから切り返して立ち上がる動作局面(モモ裏とお尻の筋肉を緊張させて立ち上がる)においての出力が弱いためか、
上半身を腰から勢いよく反らせて生み出す反動(代償動作)
を使って立ち上がる動作をする方が多いです。
姿勢面でも、いわゆる ”反り腰” の癖がある方です。
この 姿勢・動作面での ”反り腰” は、圧倒的に女性の方に多く見られます。
女性クライアントの概ね8割くらいに上るでしょうか。
男性クライアントでは、あまり見られません。
話が長くなり過ぎるため、これについては別途書きたいと思います。
そうだからといって、人に押してもらったりするなどの受動的に関節を動かすストレッチ(パッシブストレッチ)が不要というわけではありません。
動的可動域も ”機能しない可動域” の範囲以上には広がらないので、まずは最初に ”機能しない可動域” を広げることも
動的可動性向上の土台の一つになります。
また、当店の動的可動性を構成する基本的な要素へのアプローチ項目を挙げると、
➀安定させるべき関節(安定関節)を安定させながら、動かすべき関節(動的関節)をしっかり動かせること(ジョイントバイジョイントの考え方)
→姿勢と呼吸機能(ZOA・IAP・適正呼吸量)へのアプローチを重視しています。
ジョイントバイジョイントの構成要素①呼吸と腹圧(編集中)
➁伸びるべき筋肉の柔らかさ(拮抗筋の伸張性)
→起始停止を離す・体性感覚刺激(振動覚・圧覚)・相反抑制・呼吸へのアプローチを重視しています。
③縮むべき筋肉の力の強さ(主動筋の収縮力)
→神経伝達力・瞬発力へのアプローチを重視しています。
➃身体の感覚に対する情報を基に動きを微調整しながら適応する能力
→三つのバランス能力(体性感覚・前庭覚・視覚)に対するアプローチを重視しています。
当店では
この動的可動域の獲得に加えて、
それを精度高く汎用的にコントロールする技術の習得までを目指しています。
そのため、単に機能解剖学的要素での呼び名である
” 動的可動域(自力で関節を動かせる範囲 ”
と表現するのではなく
” 動的可動性(自力で関節を動かせる範囲 +自由に動きをコントロール出来る能力 ”
と表現をしています。
(参考)
(※1)厚生労働省e-ヘルスネット| e-ヘルスネット(厚生労働省) (mhlw.go.jp)
(※2)公益社団法人日本リハビリテーション医学会 関節可動域一覧
(※3)公益社団法人日本リハビリテーション医学会 成人における下肢伸展挙上角度について